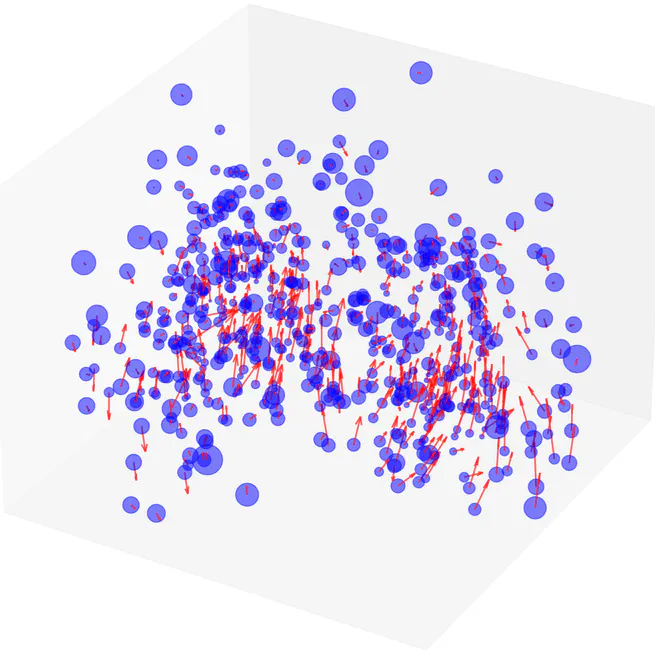
Gaussian Representation for Deformable Image Registration
This paper presented a novel deformable image registration (DIR) technique using parametric 3D Gaussian control points to model continuous spatial deformation fields effectively. By integrating transformation vectors with linear blend skinning (LBS) for voxel motion interpolation, our approach simplifies computational demands while ensuring high accuracy and efficiency. The adaptive density of Gaussian points further allows for precise handling of varying motion complexities.
Nov 9, 2024
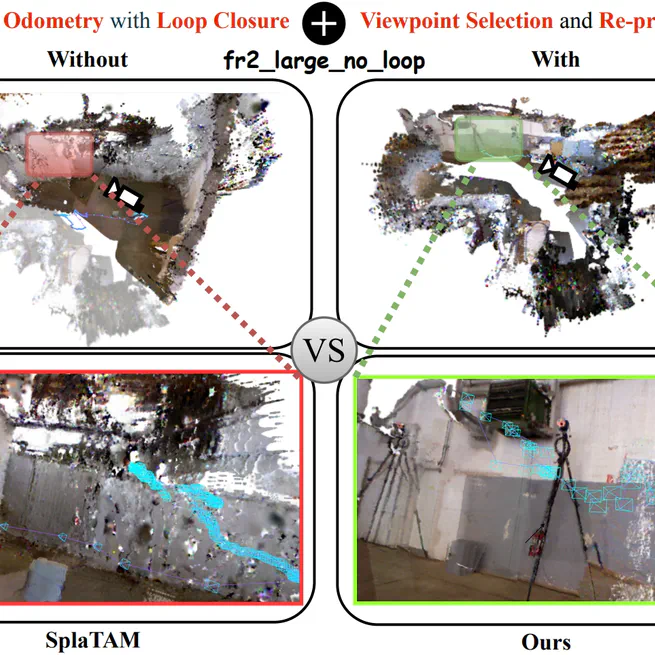
TAMBRIDGE: Bridging Frame-Centered Tracking and 3D Gaussian Splatting for Enhanced SLAM
Our goal was to develop a 3DGS-based SLAM system suitable for intelligent robotic perception tasks. The system is designed to meet the real-time requirements of robotic perception, and is robust against random sensor noise, motion blur and challenges posed by long-session SLAM. To achieve this, we have implemented a plug-and-play Fusion Bridge module that filters redundant views and leverages the anchoring effect of reprojection errors to estimate poses for rendering initially. This approach marks the first integration of a tracking-centered paradigm with an ORB-based visual odometry frontend together with a 3DGS-centered backend. Our system consistently achieves realtime localization and near-real-time rendering at over 5 FPS on the real-world TUM RGB-D dataset. Furthermore, it significantly surpasses SplaTAM in localization accuracy, rendering quality, and robustness in scenarios involving motion blur and long-distance SLAM tasks
May 30, 2024